著者: クッキー
編集者: TechFlow
Web3テクノロジーの継続的な発展により、分散型空間インテリジェンスネットワーク(DeSPIN)は注目を集める分野になりつつあります。 DeSPIN は、現実世界の視覚データを分析して活用することで、地図作成、都市計画、ロボット工学のための革新的なソリューションを提供するだけでなく、新しい「貢献して稼ぐ」経済モデルも開拓します。この記事では、DeSPIN のコアコンセプト、主要プロトコル、将来の開発方向について詳しく説明します。

DeSPINとは何ですか?
空間インテリジェンスは、現実世界の視覚データを分析して洞察を抽出するテクノロジーです。その中核は、地理情報と環境コンテキストを組み合わせて人間の意思決定をサポートすることにあります。分散型空間インテリジェント ネットワーク (DeSPIN) は、このテクノロジーをブロックチェーンと Web3 の分散型コンセプトと組み合わせて、オープンで共有されたエコシステムを形成します。日常生活で撮影した道路の写真や、ショッピングモールや街頭で記録した環境データを共有することで収入を得ることができると想像してみてください。このモデルは、データ収集の敷居を下げるだけでなく、一般ユーザーが空間知能の開発に貢献することを奨励します。
DeSPIN の具体的な用途を理解する前に、まず空間インテリジェンスの基本的なフレームワークを理解する必要があります。空間知能は次の 4 つのコア コンポーネントで構成されます。
- データ収集: センサー ネットワーク (カメラ、GPS など) や IoT デバイス (携帯電話、ラップトップなど) を使用してデータを収集します。
- データ処理と分析: 機械学習技術を使用して地理メタデータを処理し、データ内のパターンを識別し、空間クエリ データベースを構築します。
- 知識表現: セマンティック マッピングを通じてデータを環境コンテキストに関連付け、視覚化された地理情報をユーザーに提供します。
- 意思決定支援システム: 空間予測モデルを構築し、ルート最適化、障害物回避などのアプリケーション サービスをユーザーに提供します。
DeSPIN分野の主なプロトコル
現在、DeSPIN 分野では、さまざまなアプリケーション シナリオに焦点を当てたいくつかの革新的なプロトコルが登場しています。注目に値する 8 つのプロジェクトを以下に示します。
1. ハイブマッパー
Hivemapper は、Drive-2-Earn モデルを採用した分散型マップ構築プロトコルです。ユーザーはモバイル アプリケーションを通じて道路の問題をリアルタイムで報告し、ドライバーは車両に搭載されたダッシュ カメラを通じてデータを収集します。これらのデータは AI アルゴリズムによって処理され、地図が生成され、その精度は人間のフィードバック強化学習 (RLHF) によって検証されます。 Hivemapper はカバレッジ マップを提供し、ユーザーはマップされたエリアを確認し、API を通じてデータにアクセスできます。データ提供者には $HONEY トークンが報酬として与えられ、マップデータやその他のサービスの購入に使用できます。
2.NATIXネットワーク
NATIX ネットワークは、モバイル デバイスとダッシュ カムを通じて道路データを収集することに重点を置き、「運転して稼ぐ」モデルを採用した分散型マップ エコノミー プロトコルです。コア技術であるVX360は360度パノラマデータ収集をサポートしており、収集されたデータは自動運転最適化などの運転支援機能の開発に活用できます。現在、NATIX ネットワークは 171 か国をカバーしており、登録ドライバーは 223,000 人を超え、総走行距離は 1 億 3,100 万キロメートルに上ります。データ提供者とネットワークノードの両方が $NATIX トークン報酬を受け取ることができ、エコロジカルな発展をさらに促進することができます。
Hivemapper と NATIX はどちらも、クラウドソーシングされた道路データを通じてより優れた地図を構築することに取り組んでいます。これらのデータの潜在的な応用シナリオは非常に幅広く、主に以下の側面が含まれます。
- 都市交通の最適化: リアルタイムで収集された道路データを分析することで、交通流管理を改善し、渋滞を軽減し、移動効率を向上させることができます。
- 道路状況の監視: 道路の損傷、障害物、その他の潜在的な問題を速やかに検出して報告し、インフラストラクチャの安全性と信頼性を維持します。
- 犯罪や暴力の検出: 地図データと AI アルゴリズムを組み合わせて使用することで、異常な行動を特定して特定し、公共の安全をサポートできます。
これらのアプリケーションは、地図の機能性を向上させるだけでなく、都市管理や社会保障にも実用的な価値をもたらします。
3. フロドボット
FrodoBots は、ロボットによるゲーム化されたデータ収集のためのプロトコルです。ユーザーは地上ロボットをリモート制御して地理データを収集し、複数の操作方法 (コントローラー、キーボード、ゲーム ステアリング ホイールなど) をサポートできます。さらに、研究者はテストのためにプラットフォーム上に AI ナビゲーション モデルを展開することもできます。ユーザーは運転タスクを完了することで FrodoBot ポイント (FBP) を獲得します。ポイントはタスクの距離と難易度に関係します。距離が長く、難易度が高いほど、獲得できるポイントが多くなります。 FrodoBots はいくつかの都市でテストされ、ナビゲーション機能に関して AI と人間の間で競争が行われました。さらに、FrodoBots は Earth Rovers School という「ギルド」のようなシステムも設立しており、新規ユーザーは Earth Rovers をレンタルしてデータ収集に参加することができます。
4.ジョジョワールド
JoJoWorld は 3D 空間データ収集に重点を置いたプロトコルであり、ユーザーは 3 次元モデルのトレーニングに役立つデータを提供します。このプラットフォームは、さまざまなデジタルシーンを作成するための高品質の 3D データを提供し、仮想現実や都市計画などの分野に適しています。ユーザーはこれらの 3D データを直接購入して、パーソナライズされたデジタル モデルを開発することもできます。
次の 4 つのプロトコルも現実世界の空間データの収集に重点を置いていますが、その適用領域はより細分化されており、ロボット モデルのトレーニングなどの特定のシナリオをカバーしています。これらのプロトコルは、ロングテール データと特定のニーズに焦点を当てることで、分散型空間インテリジェンス ネットワーク (DeSPIN) エコシステムにさらなる可能性をもたらします。
5. プリズマXAI
PrismaXAI は、手と物体の相互作用、動的な動き、社交的な集まりなどの複雑なシーンに適した、一人称視点からシーン固有のデータを収集するためのプロトコルです。その中核技術である Proof-of-View は、分散検証メカニズムを通じてデータ注釈の精度を向上させながら、データの信頼性を保証します。このプロトコルはロングテールデータを取得する上で大きな可能性を秘めており、モデルのトレーニングに独自の利点を提供します。
6. オープンマインドAGI
OpenMind AGI は、ビジョン・言語・アクション・モデル (VLAM) を通じて現実世界の理解を達成することに重点を置いています。コアシステム OM1 は、動的な現実世界の環境と対話できるマルチプラットフォーム オペレーティング システムであり、ロボット技術のカスタマイズされた開発に特に適しています。このプラットフォームは、携帯電話やロボットを通じてデータを収集し、そのデータをロボット開発者と共有して、ロボットのアプリケーションシナリオの改善と革新を図ります。
7.メッカAI
MeckaAI は、ユーザーがビデオ データをアップロードしてロボットの動作モデルのトレーニングを支援する、分散型ロボット AI モデル トレーニング プロトコルです。このプラットフォームは、ユーザーがタスクを完了することで OG Mecka ポイントを獲得できるモバイル アプリケーションを提供し、データの貢献をさらに奨励します。 MeckaAI は、クラウドソーシングを通じてロボット技術の発展を促進し、トレーニング データの取得のハードルを下げることに取り組んでいます。
8.Xmaquina DAO
Xmaquina DAO は、オープンソースのロボット工学プロジェクトをサポートする分散型自律組織 (DAO) です。モデルのトレーニングに直接参加する他のプロトコルとは異なり、Xmaquina DAO の中心的な目標は、リソースの割り当てを通じてロボット工学の分野における研究と革新をサポートすることです。社内のイノベーションセンターである Deus Lab はロボット工学技術の研究開発に重点を置いており、MachineDAO はトークン $DEUS をステーキングすることでどのプロジェクトにリソースを割り当てるかを投票で決定します。このモデルは、リソース割り当ての透明性と公平性を確保しながら、ロボット技術のオープンソース開発に資金援助を提供します。
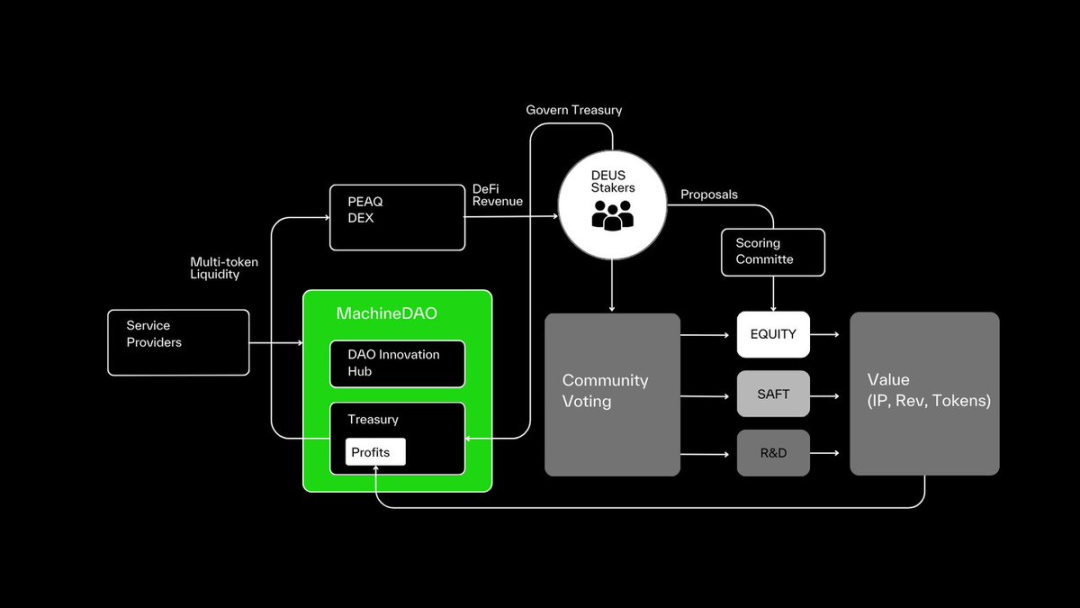
MachineDAOの組織構造
スペースの制限により、ここでは詳しく説明しませんが、Alaya_AI、Gata_xyz、KrangHQ など、同様の分野にいくつかのアプリケーション プロトコルがあり、これらも注目に値します。
DeSPINの未来: 貢献から価値へ
DeSPIN はまだ初期段階ですが、その可能性は無視できません。物理AIや具現化AIの発展、そしてヒューマンデータフリートなどの新しい概念の台頭により、DeSPINは新たな技術革命をリードすると期待されています。
一つのトレンドとして考えられるのは、ユーザーが日常生活で得られる空間データを通じて価値を提供し、データの質に応じて報酬を受け取る「Train-to-Earn」(T2E)モデルの普及です。たとえば、分散型アイウェアデバイスの出現により、データ収集の精度と多様性が大幅に向上します。スマートグラスでキャプチャされたデータは、人間が世界を知覚する方法を最もリアルに反映できるだけでなく、環境ノイズや顔の特徴などのロングテールデータを大量に収集し、空間インテリジェンスの分野に幅広い可能性をもたらします。
ただし、DeSPIN の開発には次のような課題もあります。
- データ検証: クラウドソーシングされたデータの信頼性と正確性をどのように確保するか?
- 倫理的問題: プライバシーの漏洩や乱用を避けるためにデータの使用をどのように規制するか?
- 需要側の受け入れ: 従来の機関は分散型データセットを採用する意思があるか?
これらの問題の解決は DeSPIN の将来の方向性を決定するものであり、今後さらに研究され解決される必要があります。